
1 Introduction
The World Robotic Sailing Championship 2019 will be organized during August 25th – 29th in Ningbo, China. The World Robotic Sailing Championship will be followed by the International Robotic Sailing Conference that will be held on August 30th and 31st in Ningbo, Zhejiang Province, China. The organizing committee invites teams from any organization, including private individuals, schools, colleges, universities and companies, to enter the competition. Each team competes with one boat; the team members can be shared among different teams. The championship will be organized in 4 challenges, each one tentatively allocated to a single day.
2 Classes
The only restriction on the participating ships in the WRSC is that no electricity or fuel can be used as the energy source. The teams must be able to clearly demonstrate this to the race committee. Vessels may use any type of hull (mono or multi) and any type of rig, with one or more soft or rigid sails. The beam of multi-hulls should not exceed their LOA (length overall, maximum length of the hull measured parallel to the waterline) and the maximum draft of any boat should be limited to 2 m. Hydrofoils are allowed. Sails and appendages may be changed between challenges. What’s more, teams won’t be grouped by hull this year.
3 Liability and Safety
All sailing robots must be controllable by a designated human helmsman throughout all events. The responsibility for avoiding any collision, damage or personal injuries will rest solely with the respective teams. The organizers will not assume any liability with respect to third party damages, personal injuries or environmental contamination resulting from any activity of a team participating in the WRSC. All teams are responsible for their own safety during the event and the decision to participate in the competitions is of the exclusive responsibility of the team members. Before being allowed to compete, each team has to register a person of contact who will be held responsible for any damage, injury or environmental contamination resulting from any activity of the team, including the operation of their vessel. All sailing boats will be under the supervision of support vessels provided by the organization. All people on board of a support vessel must follow the safety instructions of the driver and must provide their own personal floatation device which must be worn at all times while on or near the water. We aim to allow at least one member per team on a support vessel, however the organisers reserve the right to manage the fleet of support vessels, and can refuse access to the support vessels for any reason. All team members must follow the instructions of the competition organisers, the support vessel crew, and the activity centre personnel. The organizers reserve the right to refuse access to restricted areas.
4 Collisions and Right of Way
Autonomous boats have right of way over manually controlled boats. In the event of a potential collision, then COLREGs rules must be followed (for example, a boat on a starboard tack has right of way, etc). However, all competitors must take appropriate actions to avoid collisions and having right of way is not an acceptable excuse for allowing a collision to take place. Remote control is allowed to avoid imminent collisions for the boat with no right of way. Alternatively, a collision may also be prevented by manually holding the boat with no right of way, but ensuring that its position and heading is maintained until the risk of collision has passed. In the case a boat gets entangled with a buoy or any other floating debris (seaweed, lines, fishing nets, etc) it can be assisted manually, as long as no advantage is given to the boat and the required safety boat has not higher priority tasks.
Any remote controlled or manual measures during a challenge must be communicated to the race committee directly after the challenge.
5 Remote control
All teams are required to be able to take over remote-control of their boats through a wireless connection (WiFi, RC, …). The country specific regulations on wireless communication must be obeyed, e.g. WiFi boosters beyond the allowed limits may not be used. Should the race committee have doubts about the remote controllability it may ask for a demonstration and restrict participation in challenges. Remote control is allowed to transport competing vessels to the challenge area, but must be switched off several metres from the start line.
6 Scoring
The WRSC is organized in 4 challenges scheduled for each day of the event: fleet race, station keeping and avoidance, Collaborative area scanning and Hide and seek. The scoring for each challenge will be based on the real-time positioning track uploaded by the tracker sorted from the first to the Nth (N = team number). In each challenge, the team that completed the challenge target ranked first in the project with a score of 1.0. The second place is divided into 1.2 points, the third place is divided into 1.4 points, and so on. The team who does not fulfill the minimum objectives defined for each challenge and who decides against participating in one of the challenges will be given a score one point more than the score of the team ranking last of the team who finish the challenge. The team with the lowest sum of scores will be declared the winner of the World Robotic Sailing Championship. Whenever possible the results will be posted in the Race Office at the end of each day (no later than morning of the next day).
7 Data recording
7.1 Measurement units
All measurements for scoring are to be made in SI units, with the exception of angles and latitude/longitude measurements, which should use degrees in decimals. The position must be tracked for all data as detailed in the next section. Some challenges offer bonus points for recording specific data, which will be detailed in the challenge description.
7.2 Tracking
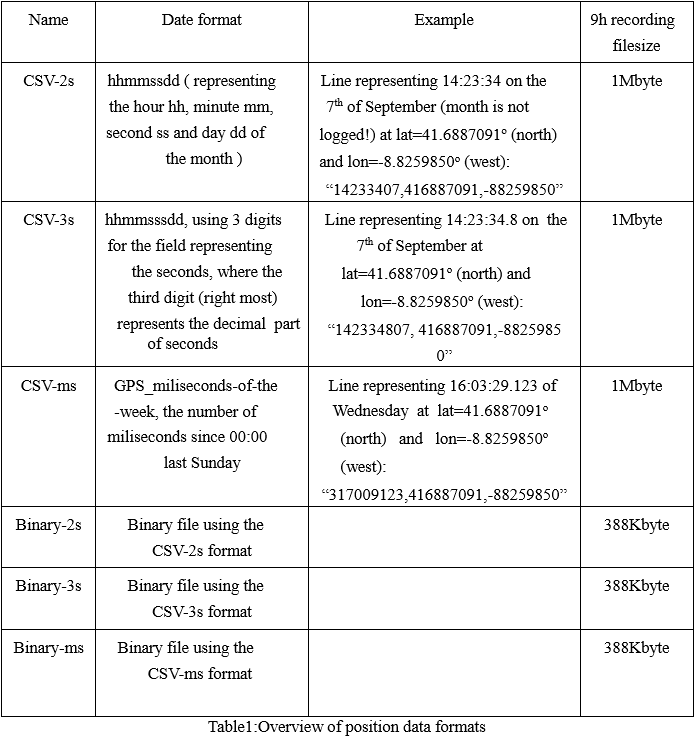
Each boat has to fit an official standalone tracking device of ca. 5cmx3cmx10cm size, positioned suitably for GPS reception. Additionally the competing boats should be able to provide the race committee with the tracking data recorded from their own global navigation satellite system (e.g. GPS), since this will be used in case of failure of the official device. The tracking data to be provided by each boat should include a timestamp and the lat/lon coordinates, with not less than one track point per second. This data may be provided either in CSV (comma-separated values) or binary format. All CSV format files must use three decimal integer number per line, representing: timestamp, Lat∗107, Lon∗107. The binary file format uses 12-byte records representing the three 32-bit signed integers of the CSV format in two’s complement. The storage order may be little-endian or big-endian, the chosen order must be specified by the team. The allowed data formats are detailed in table 1.
8 Challenge Rule
WRSC will be organized in 4 challenges, requesting various abilities of sailing robots. Scoring of every challenge is based on the real-time route provided by our tracker. Among teams that have completed the minimum objective of a challenge, first place will get a score of 1.0, while 1.2 for second place, 1.4 for third place, etc. Teams that have not complete the minimum objective will get a score of:
Score of the last team that have completed this challenge + 1.
The score of each challenge will be combined to give a total score. The team with the smallest “Ranking point” in the end will win the championship.
The precise locations and time limits will be announced in the morning of each challenge, according to the regional short-term weather forecast. The race committee may decide to change the challenge days, run challenges over multiple days, or run multiple challenges in one day if deemed necessary due to weather conditions. In challenges except “Area Scanning” (challenge 3), teams can have more than one attempt if time is sufficient and the best result will be selected. The next sections give details on the rules for each of the challenges.
0. Lunching Sequence
For challenges except collaborative area scanning (Event 3), additional specifications and instructions are offered on launching time and sequence of ships:
- Given enough time and good weather conditions, multiple attempts are allowed for each team, and the best results will be taken.
- Each region can accommodate up to eight teams launching at the same time. If more than 8 teams apply for launching, teams will be queued according to their priority.
- The well-prepared teams can apply for launching, and applications will be queued according to their priority (the more launching attempts a team makes, the lower priority the team has; teams of the same priority will be sorted according to the appointment time). If a team gives up or completes the attempt ahead of time, the sequence of teams moves forward in turn.
- Each team has up to 30 minutes for one try. Within 30 minutes, the team can move between shore and water and run challenges freely.
The interpretation right of the sequence rules belongs to the referee group.
1. Fleet race
This challenge is based on the classical triangular sailing race course. Boats will start from starting line in turn with 30 second intervals, cross the start line, reach three markers and then leave from finish line.
Locations of markers will be published in the morning of that day.
The challenge area will be divided into two regions, signing as A and B. In each one of the regions 12 teams are supposed to run the challenge. At 6 PM the day before the competition, all teams are supposed to draw lots to decide the region in which they will run the challenge. Please be advised that the final results of the two regions will be calculated together.

1.1 scoring
A mark/buoy is considered as reached/passed if at least one track point is recorded within a circle of radius 5m around the position of the (virtual) marker. Teams are scored based on the time between crossing the start line and reaching the last marker. Teams that do not complete the race will be scored according to number of markers they reached in the correct order. Teams reaching the same number of markers will be distinguished based on their time between crossing the start line and arriving at their last marker.
1.2 Minimum objective
To be considered for the scoring, the vessel must complete at least the first leg, from the start line to the
first buoy.
2. Station keeping and avoidance
Station keeping challenge is also called ’virtual moorings’, originated from real applications in which your boat need to moor or cruise at a fixed place. This challenge, consisting of part A and B, tests the ship’s ability to precisely control in small-scale. You need to complete part A before going to the other area to complete part B (as shown in the figure).
The challenge area will be divided into two regions, signing as A and B. In each one of the regions 12 teams are supposed to run the challenge. At 6 PM the day before the competition, all teams are supposed to draw lots to decide the region in which they will run the challenge. Please be advised that the final results of the two regions will be calculated together.

2.1 Part A
The length of part A is 5 minutes. During this time, your boat should stay as close as possible to the virtual buoy, the buoy position is given by a GPS location. The challenge area is a circle with a radius of 15m. Sailing boats will be released at least 30m away from keeping center. Time starts counting when sailing boat enters challenge area for the first time. If your boat failed to enter challenge area 5 minutes after releasing, this attempt is considered as invalid.
2.1 .1 Scoring — Part A
The average distance between sailing boat and virtual buoy during 5 minutes of challenge time will be the final ‘cruise radius’. Smaller ‘cruise radius’ means better performance.
2.1.2 Minimum objective — Part A
To be scored in this contest, the vessel must enter the challenge area (R = 15m) and achieve a ‘cruise radius’ smaller than 15m.
2.2 Part B
The length of part B is 3 minutes. In this part, the challenge area is centered on a physical buoy, located in an unknown position in a 10m*10m area. The exact position of the buoy should be obtained by visual or other detecting method while collisions with the buoy will be punished. Sailing boats will be released at least 30m away from keeping center. Time starts counting when sailing boat enters a circle with radius R = 15m around the physical buoy the first time. If your boat failed to enter challenge area 5 minutes after releasing, this attempt is considered as invalid.
2.2 .1 Scoring — Part B
The final ‘cruise radius’ is calculated based on the average distance from keeping center and number of collisions:
Cruise radius = (The Average distance)*Sqrt(1+the Collision times) Smaller ‘cruise radius’ means better performance.
2.2.2 Minimum objective — Part B
To be scored in this contest, the vessel must enter the circle with radius R = 15m around the keeping center and achieve an average distance (before considering collision punishment) smaller than 15m.
2.3 Scoring – A + B
Teams are scored based on the average ‘cruise radius’. Teams who finished both parts always ranked higher than those who only finished part A.
3. Collaborative area scanning
In recent years, an increasing number of attempts is made at using maritime vessels in collaboration. A typical collaborative task is efficiently scanning a large area. The collaborative area scanning challenge asks teams to take the abilities and scanning goals of other teams into consideration to optimize their own points. The scanning task is performed over a large area that is sub-divided into grids.
The scanning area is 50m * 50m and each grid is 2.5m * 2.5m. The setup area is 5 meters away from the scanning area.
Teams will be evenly divided into 4 groups by drawing lots. Four groups take turns running the challenge in different periods of time. Scores in one group does not affect that in other groups. Under non-suitable wind condition, applications for pause are allowed. At 6 PM the day before the competition, all teams are supposed to draw lots to decide the group in which they will run the challenge. Please be advised that the final results of all groups will be calculated together.
30 minutes are allowed for each try. A 5-minute interval is set between two groups. A total available-time of 15 minutes is given for each team to run the challenge.
During the area scanning challenge, the vessel tracker position is made available to all teams via the live tracking website. A 4G/3G module is recommended if vessels want to receive real-time tracking data of other boats so that they can plan which grids are worth visiting.
In order to achieve better cooperation, this year we will regularize the “time out” process. If your need to adjust your boat during the challenge, you can apply for a time out: register the current time with the race committee and recover your vessels either by requesting a safety boat or by remote controlling the boat to a start buoy. Any positions will be discarded and time counting will be stopped during the time out. Your vessels should be relaunched from the start buoy which is the closest to your position before the time out.

3.1 Scoring
The first team that explore one grid gains 100% score. The nth team gains 1/n * 100% score. Ranking is based on total score gained by teams.
3.2 Minimum objective
To be scored in this contest, the vessel must enter the scan area and explore at least one grid.
4. Hide and seek
This challenge involves interaction and counterwork. Detecting and chasing particular target is a complex high level task for auto vessels.
This year we design this hide and seek challenge. Your team will race against a partner team whose ranking is close to you (determined by the ranking of the first three challenges, the first and the second form a group, the third and the fourth form a group, and so on). Here the team that competes with you in this challenge is called the partner team.
Time limit of this challenge is 15 minutes. Each team will be assigned a pair of circles (shown in grey or transparent in the figure) and start the challenge from one of the circles (grey from left and transparent from the right). The diameter of circles is 5m, distance between a pair of circles is 30m and distance between two pairs of circles is 10m. Vessels may choose to ‘hide’ or ‘seek’, and scores will be given to every successful attempt. ‘Hide’ means the vessel sails between its two circle and each back and forth is one ‘hide’. ‘Seek’ means detecting the AprilTag of your partner’s. Two different AprilTags will be put on the sail of each vessel one on each side (A4 size). (Both teams get 3 points as shown in the figure). Detect and identify the AprilTag is a successful ‘seek’ during one back and forth trip. Multiple identifications of a same tag within a single trip do not add up.
The challenge area will be divided into two regions, signing as A and B. In each one of the regions 12 teams are supposed to run the challenge. At 6 PM the day before the competition, all teams are supposed to draw lots to decide the region in which they will run the challenge. Please be advised that the final results of the two regions will be calculated together.

4.1 Scoring
One successful ‘hide’ is 1 point and one successful ‘seek’ is 3 points. If you are not detected during the whole challenge, you will get three extra points. In each ‘hide’ trip you can at most do two ‘seek’. Teams should provide data of its Apriltag detection (raw image) and record time and position of each image. If the tag in the image is recognizable, it is one successful ‘seek’. We will provide a basic example of reading AprilTag. Ranking is based on total points.
4.2 Minimum objective
To be scored in this contest, the vessel must achieve one ‘hide’ or one ‘seek’.
You can download the WRSC rule pdf: WRSCrule
点击此处下载WRSC中文版规则:WRSC规则中文版